In algebra lineare, il determinante di una matrice quadrata è un numero che descrive alcune proprietà algebriche e geometriche della matrice. Si tratta di un potente strumento usato in vari settori della matematica, ad esempio nello studio dei sistemi di equazioni lineari, nel calcolo infinitesimale a più dimensioni (ad esempio nello Jacobiano), nel calcolo tensoriale, nella geometria differenziale, o nella teoria combinatoria.
Il significato geometrico principale del determinante si ottiene interpretando la matrice quadrata di ordine come trasformazione lineare di uno spazio vettoriale a dimensioni: con questa interpretazione, il valore assoluto di è il fattore con cui vengono modificati i volumi degli oggetti contenuti nello spazio (anche se ciò è improprio senza considerare il significato di misura). Se è diverso da zero, il segno del determinante indica inoltre se la trasformazione preserva o cambia l'orientazione dello spazio rispetto agli assi di riferimento.
Esso viene generalmente indicato con e, a volte, con . Quest'ultima notazione è più compatta, ma anche più ambigua, in quanto utilizzata talvolta per descrivere una norma della matrice.
Definizione
Il determinante di una matrice 2 × 2 è pari a:
Per definire il determinante di una generica matrice quadrata si possono seguire due approcci: quello assiomatico, che definisce il determinante come l'unica quantità che soddisfa alcuni assiomi, e quello costruttivo tramite una formula esplicita. Esistono poi vari metodi di calcolo che risultano più agevoli a seconda del contesto.
Definizione tramite assiomi
Sia lo spazio vettoriale delle matrici quadrate a valori nel campo (ad esempio, il campo dei numeri reali o complessi).
Il determinante è l'unica funzione avente le proprietà seguenti:
- dove la matrice è la matrice identità di ordine .
- Si comporta nel modo seguente rispetto all'algoritmo di Gauss-Jordan:
- se è ottenuta scambiando due righe o due colonne di , allora
- se è ottenuta moltiplicando una riga o una colonna di per , allora
- se è ottenuta sommando un multiplo di una riga o di una colonna rispettivamente di a un'altra, allora
Le proprietà elencate hanno un significato geometrico: sono le proprietà che deve verificare una funzione il cui valore assoluto è il volume del poliedro individuato dai vettori riga della matrice e il cui segno è positivo se e solo se tali vettori sono equiorientati alla base canonica.
Definizione costruttiva
Il determinante di una matrice può essere definito in un modo più costruttivo, tramite la formula di Leibniz:
Nella formula, è l'insieme di tutte le permutazioni dell'insieme numerico , denota il segno della permutazione ( se è una permutazione pari, se è dispari) e indica l'-esimo elemento della permutazione.
Da questa formula si vede che il numero di elementi della sommatoria è uguale a (la cardinalità di ).
Per esempio, il determinante di una matrice (cioè ) è
In particolare:
- Se , il determinante di è semplicemente:
- Se , si ottiene la formula già vista:
- Se , si ottiene:
Quest'ultima formula può essere memorizzata tramite la regola di Sarrus (che non è però estendibile ai casi ).
La complessità della definizione costruttiva (comprese la generazione delle permutazioni) è elevata:
Metodi di calcolo
La definizione costruttiva del determinante è spesso complicata da usare per un calcolo concreto, perché si basa su una somma di ben addendi. Esistono altri algoritmi che consentono di calcolare il determinante più facilmente. Ciascun metodo ha una efficienza variabile, dipendente dalla grandezza della matrice e dalla presenza di zeri.
Matrici quadrate di ordine 2
Il determinante di una matrice 2 × 2 è:
Il valore assoluto di questa espressione è uguale all'area del parallelogramma con vertici in e . Il segno del determinante (se diverso da zero) dipende invece dall'ordine ciclico con cui compaiono i vertici del parallelogramma (il segno è negativo se il parallelogramma è stato "ribaltato", e positivo altrimenti).
Come spiegato più sotto, questa proprietà geometrica si estende anche in dimensioni maggiori di 2: il determinante di una matrice è ad esempio il volume del poliedro i cui vertici si ricavano dalle colonne della matrice con lo stesso procedimento visto.
Matrici quadrate di ordine 3
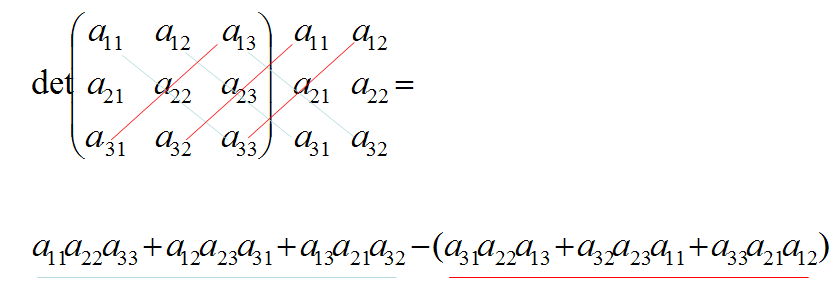
Il determinante di una matrice 3 × 3 è:
Un metodo mnemonico per ricordare questa formula, espresso dalla regola di Sarrus (questo metodo non si estende a matrici più grandi), prevede di calcolare i prodotti dei termini sulle diagonali "continue". Ripetendo a destra della matrice le sue prime due colonne:
I prodotti delle componenti sulle 3 "diagonali" che partono dall'alto a sinistra (diagonali principali) sono , e , mentre sulle 3 "diagonali" che partono dal basso a sinistra (diagonali secondarie) si trovano , , . Il determinante della matrice è esattamente la differenza tra la somma dei primi tre termini e la somma degli ultimi tre .
Notare che il valore del determinante equivale in questo caso al prodotto misto tra i vettori:
e il suo valore assoluto è uguale al volume del parallelepipedo che ha i tre vettori come spigoli.
Sviluppo di Laplace
Lo sviluppo di Laplace è un metodo di calcolo del determinante, che risulta efficiente solo per matrici molto piccole o contenenti un gran numero di zeri. Si procede scegliendo una riga, la -esima, tramite la formula:
dove è il complemento algebrico della coppia , cioè è data da per il determinante (minore) di ordine ottenuto dalla matrice eliminando la riga -esima e la colonna -esima.
Esiste uno sviluppo analogo anche lungo la -esima colonna.
Algoritmo di Gauss
La definizione assiomatica fornisce un altro utile strumento di calcolo del determinante, che si basa su questi due principi:
- Il determinante di una matrice triangolare è semplicemente il prodotto degli elementi sulla diagonale, cioè:
- Usando l'algoritmo di Gauss, è possibile trasformare ogni matrice in una matrice triangolare attraverso operazioni elementari su righe e colonne della stessa ; il cui effetto sul determinante è prescritto dagli assiomi.
Esempio
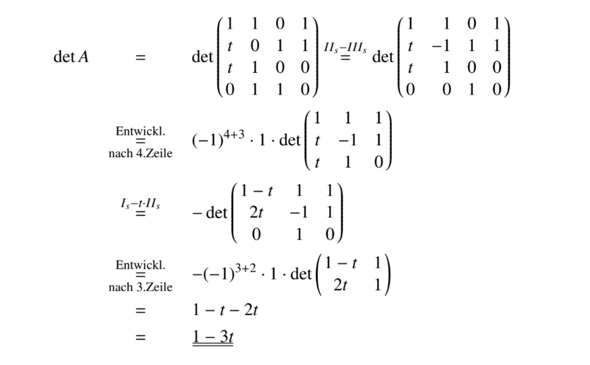
Supponiamo di voler calcolare il determinante di:
Si può procedere direttamente tramite la definizione costruttiva:
Alternativamente si può utilizzare lo sviluppo di Laplace secondo una riga o una colonna. Conviene scegliere una riga o una colonna con molti zeri, in modo da ridurre gli addendi dello sviluppo; nel nostro caso sviluppiamo secondo la seconda colonna:
Lo sviluppo di Laplace può essere combinato con alcune mosse di Gauss. Ad esempio qui risulta particolarmente vantaggioso sommare la seconda colonna alla prima:
Questa mossa non cambia il determinante. Sviluppando lungo la prima colonna si ottiene quindi ancora:
Proprietà
Proprietà elementari
Dalle proprietà elencate nella definizione assiomatica, è facile dedurre che:
- Se tutti gli elementi di una riga (o colonna) sono nulli, allora
- Se ha due righe (o colonne) eguali, o proporzionali, allora
- Se una riga (o colonna) è combinazione lineare di due o più altre righe (o colonne) a essa parallele, allora
- Se viene modificata tramite mosse di Gauss sulle colonne (invece che sulle righe), l'effetto è sempre quello descritto nella definizione assiomatica.
- In particolare, scambiando tra di loro due righe o due colonne il determinante cambia segno, restando uguale in valore assoluto. Ne consegue che un numero pari di scambi non varia né il segno né il modulo del determinante.
- Se una riga (o una colonna) è somma di due righe (o colonne), è la somma dei due determinanti che si ottengono sostituendo a quella riga (o colonna) rispettivamente le due righe (o colonne) di cui è somma.
Moltiplicazione di matrici
Il determinante è una funzione moltiplicativa, nel senso che vale il teorema di Binet:
Una matrice quadrata con valori in un campo è invertibile se e solo se . In caso affermativo vale l'uguaglianza:
Le proprietà appena elencate mostrano che l'applicazione:
dal gruppo generale lineare negli elementi non nulli di è un omomorfismo di gruppi.
Come conseguenza del teorema di Binet, è facile verificare che , dove è uno scalare. Infatti, se è la matrice identità di tipo , poiché , si ha:
Trasposte, matrici simili
Una matrice e la sua trasposta hanno lo stesso determinante:
Se e sono simili (cioè esiste una matrice invertibile tale che ) allora per il teorema di Binet
Questo significa che il determinante è un invariante per similitudine. Da questo segue che il determinante di una trasformazione lineare è ben definito (non dipende dalla scelta di una base per lo spazio vettoriale ).
D'altra parte, esistono matrici con lo stesso determinante che non sono simili.
Nel campo dei numeri reali, il segno del determinante è anche invariante per congruenza.
Autovalori
Il determinante di una matrice triangolare è il prodotto degli elementi nella diagonale.
Se è di tipo con valori reali o complessi e ha tutti gli autovalori nel campo (contati con molteplicità), allora:
Questa uguaglianza segue dal fatto che è sempre simile alla sua forma normale di Jordan, che è una matrice triangolare superiore con gli autovalori sulla diagonale principale.
Dal collegamento fra determinante e autovalori si può derivare una relazione fra la funzione traccia, la funzione esponenziale e il determinante:
Derivata
Il determinante può considerarsi una funzione polinomiale:
quindi essa è differenziabile rispetto a ogni variabile corrispondente al valore che può assumere in una casella e per qualunque suo valore. Il suo differenziale può essere espresso mediante la formula di Jacobi:
dove denota la trasposta della matrice dei cofattori (detta anche dei complementi algebrici) di , mentre ne denota la traccia. In particolare, se è invertibile si ha:
o, più colloquialmente, se i valori della matrice sono sufficientemente piccoli:
Il caso particolare di coincidente con la matrice identità comporta:
Applicazioni
Sistemi lineari
Il determinante è utile a calcolare il rango di una matrice e quindi a determinare se un sistema di equazioni lineari ha soluzione, tramite il teorema di Rouché-Capelli. Quando il sistema ha una sola soluzione, questa può essere esplicitata usando il determinante, mediante la regola di Cramer.
Matrici e trasformazioni invertibili
Una matrice è detta singolare se ha determinante nullo. Una matrice singolare non è mai invertibile, e se è definita su un campo vale anche l'inverso: una matrice non singolare è sempre invertibile.
Una trasformazione lineare del piano, dello spazio, o più in generale di uno spazio euclideo o vettoriale (di dimensione finita) è rappresentata (dopo aver scelto una base) da una matrice quadrata Il determinante è una quantità che non dipende dalla base scelta, e quindi solo dalla funzione : si può quindi parlare di determinante di , che si indica con .
Le seguenti affermazioni su sono equivalenti:
- è una corrispondenza biunivoca è un isomorfismo è iniettiva è suriettiva
Quindi ciascuna di queste affermazioni equivalenti è vera se e solo se il determinante non è zero.
Autovalori e autovettori
Il determinante consente di trovare gli autovalori di una matrice quadrata mediante il suo polinomio caratteristico:
dove è la matrice identità avente stesso ordine di
Basi, sistemi di riferimento
Dati vettori nello spazio euclideo , sia la matrice avente come colonne questi vettori. Le seguenti affermazioni sono equivalenti:
- i vettori sono indipendenti i vettori generano i vettori formano una base
Se gli vettori formano una base, allora il segno di determina l'orientazione della base: se positivo, la base forma un sistema di riferimento destrorso, mentre se è negativo si parla di sistema di riferimento sinistrorso (in analogia con la regola della mano destra).
Volumi
Il valore assoluto del determinante è uguale al volume del parallelepipedo sotteso dai vettori dati dalle colonne di (il parallelepipedo è in realtà un parallelogramma se , e un solido di dimensione in generale). Più in generale, data una trasformazione lineare:
rappresentata da una matrice , e un qualsiasi sottoinsieme di misurabile secondo Lebesgue, il volume dell'immagine è dato da:
Ancora più in generale, se la trasformazione lineare è rappresentata da una matrice di tipo e è un sottoinsieme di misurabile secondo Lebesgue, allora il volume di è dato da:
Generalizzazioni
Pfaffiano
Lo pfaffiano è un analogo del determinante per matrici antisimmetriche di tipo Si tratta di un polinomio di grado il cui quadrato è uguale al determinante della matrice.
Infinite dimensioni
Per gli spazi a infinite dimensioni non si trova alcuna generalizzazione dei determinanti e della nozione di volume. Sono possibili svariati approcci, inclusa la utilizzazione dell'estensione della traccia di una matrice.
Determinante di un endomorfismo
Se è uno spazio vettoriale di dimensione finita sul campo allora è possibile definire il determinante di un endomorfismo direttamente, senza fare ricorso a una base di . Sia lo spazio vettoriale degli vettori di . Consideriamo l'endomorfismo di definito di modo che:
per ogni , ed esteso per linearità a tutto . Poiché ha dimensione uguale a 1 risulta che altro non è che la moltiplicazione per uno scalare. Quindi possiamo definire il determinante di attraverso l'equazione:
per ogni . A questo punto seguono tutte le proprietà del determinante, in particolare è immediato che dove è l'endomorfismo identità di . Se è un altro endomorfismo di allora:
da cui . Se non è un isomorfismo allora l'immagine di ha dimensione strettamente minore di e quindi sono sicuramente linearmente dipendenti, essendo che è una forma multilineare alternante segue che e quindi . Si verifica che fissata una base su il determinante della matrice associata a rispetto a tale base coincide con il determinante di .
Storia
Note
Bibliografia
- (EN) Andrews, G. E. and Burge, W. H. Determinant Identities. Pacific J. Math. 158, 1-14, 1993.
- (EN) Arfken, G. "Determinants." §4.1 in Mathematical Methods for Physicists, 3rd ed. Orlando, FL: Academic Press, pp. 168–176, 1985.
- (EN) Brenner, J. and Cummings, L. The Hadamard Maximum Determinant Problem. Amer. Math. Monthly 79, 626-630, 1972.
- Ernesto Pascal I determinanti: teoria ed applicazioni. Con tutte le più recenti ricerche (Milano: U. Hoepli, 1897)
- Francesco Caldarera Trattato dei determinanti, in UniPI - Biblioteca Matematica Informatica Fisica (Palermo: Virzì, 1913)
- (FR) Francesco Brioschi, Théorie des déterminants et leurs principales applications; traduit de l'italien par M. Édouard Combescure, Parigi, Mallet-Bachelier, 1856. URL consultato il 25 luglio 2021.
- (FR) R. Baltzer, Théorie et applications des déterminants, avec l'indication des sources originales; traduit de l'allemand par J. Hoüel, Parigi, Mallet-Bachelier, 1861. URL consultato il 25 luglio 2021.
- (EN) Charles Dodgson An elementary treatise on determinants, with their application to simultaneous linear equations and algebraical geometry (Oxford: University Press, 1867)
- (EN) R. F. Scott e G. B. Matthews The theory of determinants and their applications (Cambridge: University Press, 1904)
Voci correlate
- Matrice jacobiana
- Matrice unimodulare
- Metodo di eliminazione di Gauss
- Permanente (matematica)
- Polinomio caratteristico
- Regola di Sarrus
- Teorema di Laplace
Altri progetti
- Wikizionario contiene il lemma di dizionario «determinante»
- Wikiversità contiene risorse sul determinante
- Wikimedia Commons contiene immagini o altri file sul determinante
Collegamenti esterni
- Determinante, su Treccani.it – Enciclopedie on line, Istituto dell'Enciclopedia Italiana.
- Salvatore Pincherle, DETERMINANTI, in Enciclopedia Italiana, Istituto dell'Enciclopedia Italiana, 1931.
- Determinante, in Dizionario delle scienze fisiche, Istituto dell'Enciclopedia Italiana, 1996.
- Determinante, in Enciclopedia della Matematica, Istituto dell'Enciclopedia Italiana, 2013.
- Determinante, in Dizionario di Economia e Finanza, Istituto dell'Enciclopedia Italiana, 2012.
- (EN) determinant, su Enciclopedia Britannica, Encyclopædia Britannica, Inc.
- (EN) Opere riguardanti Determinants, su Open Library, Internet Archive.
- (EN) Eric W. Weisstein, Determinant, su MathWorld, Wolfram Research.
- (EN) Determinant, su Encyclopaedia of Mathematics, Springer e European Mathematical Society.
- (EN) Storia dell'uso delle matrici e dei determinanti su MacTutor
- (IT) Calcolatrice per matrici e vettori online
- (EN) WebApp to calculate determinants and descriptively solve systems of linear equations, su sole.ooz.ie. URL consultato il 19 gennaio 2014 (archiviato dall'url originale il 21 febbraio 2014).
- (EN) Determinant Interactive Program and Tutorial, su people.revoledu.com.
- (EN) Online Matrix Calculator, su matrixcalc.org.
- Calcolatore dei determinanti della matrice, su physandmathsolutions.com.
- (EN) Linear algebra: determinants. Archiviato il 4 dicembre 2008 in Internet Archive. Compute determinants of matrices up to order 6 using Laplace expansion you choose.
- (EN) Matrices and Linear Algebra on the Earliest Uses Pages, su economics.soton.ac.uk.
- (EN) Determinants explained in an easy fashion in the 4th chapter as a part of a Linear Algebra course., su algebra.math.ust.hk. URL consultato il 19 gennaio 2014 (archiviato dall'url originale il 25 maggio 2009).
- (EN) Instructional Video on taking the determinant of an nxn matrix (Khan Academy), su khanexercises.appspot.com (archiviato dall'url originale il 25 marzo 2010).